隨著AGV智能物流機(jī)器人的應(yīng)用越來越廣泛,如何選擇合適的AGV產(chǎn)品就成為了用戶迫切需要了解的問題。其中,導(dǎo)航方式作為AGV的一項(xiàng)核心技術(shù),更是受到了廣泛關(guān)注。本文就對(duì)當(dāng)下AGV應(yīng)用的幾種不同導(dǎo)航方式進(jìn)行梳理,以期能夠給大家提供幫助。
目前,常見的AGV導(dǎo)航方式主要有以下幾種,分別有著不同的適用場(chǎng)景和特點(diǎn):
磁條導(dǎo)航

在路面上鋪設(shè)磁條,通過磁導(dǎo)航傳感器不間斷感應(yīng)磁信號(hào)來實(shí)現(xiàn)AGV的導(dǎo)航。
優(yōu)點(diǎn)為技術(shù)成熟可靠,成本較低,鋪設(shè)實(shí)施較為簡(jiǎn)單。缺點(diǎn)是要提前施工;磁條容易受損和污染,需定期維護(hù);且AGV行駛路線無法便捷調(diào)整,靈活性差。
磁釘導(dǎo)航

同樣是通過磁導(dǎo)航傳感器感應(yīng)磁信號(hào)來進(jìn)行導(dǎo)航,不同的是將之前的磁條連續(xù)感應(yīng)替代為磁釘間隔感應(yīng),AGV行進(jìn)路徑由磁釘連線確定。
優(yōu)點(diǎn)為技術(shù)成熟可靠,成本較低;隱蔽性較好,不易被損壞。缺點(diǎn)是需提前開鑿預(yù)埋,施工成本高;靈活性差,后期變更成本高;磁釘間隔區(qū)域存在不穩(wěn)定性,不適應(yīng)人機(jī)共融環(huán)境;且在重載場(chǎng)景下,磁釘容易被損壞,更換困難。
二維碼導(dǎo)航

由二維碼替代磁釘?shù)膶?dǎo)航方式,典型應(yīng)用為亞馬遜kiva機(jī)器人,實(shí)現(xiàn)了“貨到人”的揀選模式。
優(yōu)點(diǎn)為AGV運(yùn)行準(zhǔn)確,鋪設(shè)成本低,路徑調(diào)整較為方便;不足之處在于二維碼容易污損,需定期維護(hù);應(yīng)用柔性低,無法適應(yīng)人機(jī)共融環(huán)境;同時(shí)對(duì)作業(yè)環(huán)境(如無塵室)和地面平整度等客觀條件有一定要求。
激光反射板導(dǎo)航

在AGV行駛路徑的周圍安裝位置精確的激光反射板,AGV通過激光掃描器發(fā)射激光束,同時(shí)采集由反射板反射的激光束,來確定其當(dāng)前的位置和航向,并通過連續(xù)的三角幾何運(yùn)算來實(shí)現(xiàn)AGV的導(dǎo)引。
優(yōu)點(diǎn)為地面無需施工,AGV行駛路線靈活。不足之處在于需要提前按照一定要求鋪設(shè)反射板,成本較高;適用于周邊無遮擋的作業(yè)環(huán)境。
激光SLAM導(dǎo)航

無需二維碼、反射板等輔助導(dǎo)航標(biāo)志,而是通過工作場(chǎng)景的自然環(huán)境(比如柱子、墻面等)作為參照物,實(shí)現(xiàn)定位導(dǎo)航。
優(yōu)點(diǎn)在于無需硬件施工,部署成本低;且能夠?qū)崿F(xiàn)靈活的停障避障和人機(jī)共融作業(yè);AGV行駛路徑靈活多變,并可通過軟件進(jìn)行動(dòng)態(tài)編輯,滿足柔性生產(chǎn)需要;但在應(yīng)用中也存在一些弊端,比如在高動(dòng)態(tài)或類似透明、鏡面等環(huán)境中作業(yè)時(shí),容易出現(xiàn)定位丟失的情況。
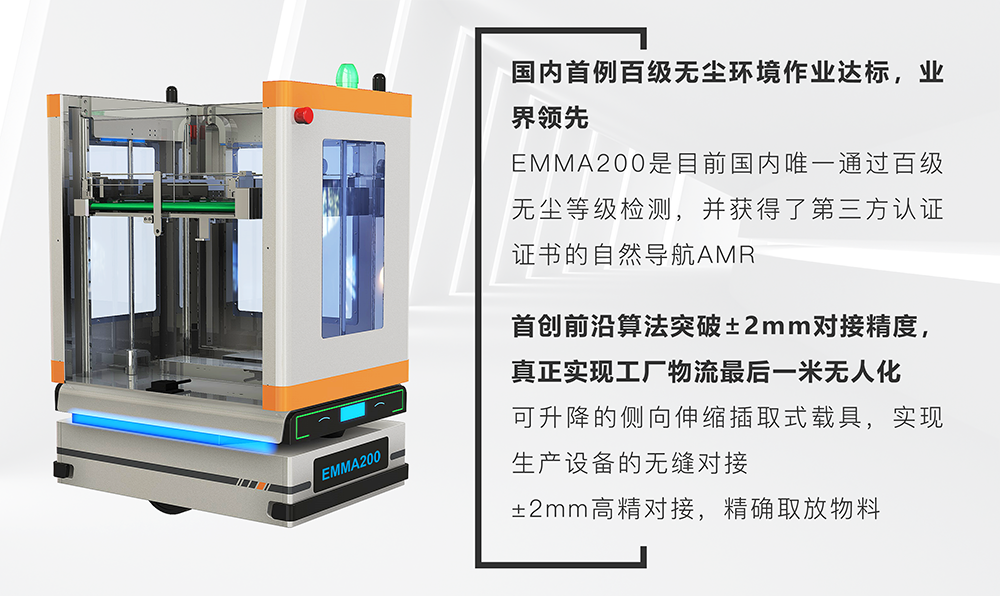
迦智激光SLAM導(dǎo)航AGV的性能特點(diǎn)和優(yōu)勢(shì)
航AGV的性能特點(diǎn)和優(yōu)勢(shì)")
當(dāng)下,迦智的激光無軌導(dǎo)航AGV已經(jīng)在包括電子信息、汽車與汽配、電力成套、醫(yī)藥、新能源、紡織服裝等多行業(yè)有了成熟的應(yīng)用案例,助力企業(yè)精益生產(chǎn)管理,提升運(yùn)作效率,真正實(shí)現(xiàn)智能工廠。
 <\/p>
<\/p>











 浙公網(wǎng)安備 33010802011917號(hào)
浙公網(wǎng)安備 33010802011917號(hào)